After the bad crash – the bitter outcome of this otherwise successful flight – I rebuilt the ELEV-8, and finally had the chance to fly it this afternoon. One of the props is acting a little janky, so I need to check that the ESCs are all programmed correctly, and determine whether or not that particular motor has a bent shaft, but am otherwise happy with the outcome.
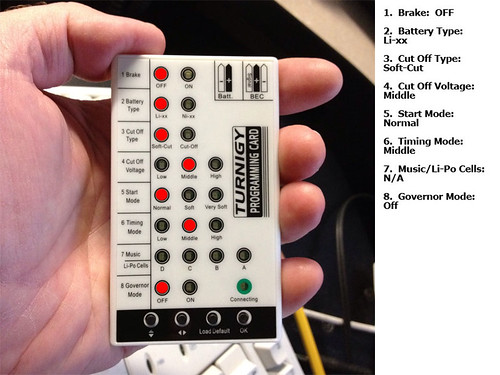 One of the crucial tasks in getting the quadcopter flying is programming the ESCs, or Electronic Speed Controllers. They store a variety of parameters, not all of which I entirely understand, but all of which need to be set for each ESC. The Turnigy Programming Card pictured above makes this process easy. Simply connect the ESC to the card, load the settings, and repeat. I created this little job aid as a quick reference for the appropriate settings.
One of the crucial tasks in getting the quadcopter flying is programming the ESCs, or Electronic Speed Controllers. They store a variety of parameters, not all of which I entirely understand, but all of which need to be set for each ESC. The Turnigy Programming Card pictured above makes this process easy. Simply connect the ESC to the card, load the settings, and repeat. I created this little job aid as a quick reference for the appropriate settings.
 Join colleagues from across the district for an Epic 24 Hour EdTech Jam. Pick an edtech project that you’ve never been able to find the time for – learn a new tool or technology, convert an onground course to hybrid or online, create audio/video lessons or OER resources – and commit to working it out in an all night grueling marathon of innovation, creativity, and productivity. Embrace adversity!
Join colleagues from across the district for an Epic 24 Hour EdTech Jam. Pick an edtech project that you’ve never been able to find the time for – learn a new tool or technology, convert an onground course to hybrid or online, create audio/video lessons or OER resources – and commit to working it out in an all night grueling marathon of innovation, creativity, and productivity. Embrace adversity!
November 2 – 3, noon to noon NONSTOP
FLC Innovation Center (FL1-130)
Wear comfortable clothes.
Bring your own device.*
Come prepared to work on a weighty project.
If you need Zack’s help with anything, let him know ahead of time – he’ll try and help you out.
*A limited number of desktops/laptops/netbooks will be available, if you don’t have your own.
Friday’s flight ended in a tree, but in the seconds before that crash, I had the idea for the first time that I might just be able to fly this thing. I thought about it all weekend, and resolved to never again fly without the GoPro.
This morning, I strapped the camera to the bottom of the aircraft, and headed down to the loading dock behind the bookstore. I’m actually starting to get the hang of this thing, though I am still seized with a tiny bit of panic when first it jumps into the air, and sometimes when it seems to make its own decisions. Nevertheless, I was able to execute seven or eight successful – successful here being defined as flights that don’t end in repairs – takeoffs and landings. Here’s video from the best one:
To do:
Tweak the camera settings to limit the width of the angle
Come up with a better way to secure the camera to the quadcopter – as it is, I’ve zip-tied it to the bottom, but have to waste a tie each time I remove the camera.
Got a bunch of flight time in today, and I’m starting to just barely get the hang of it. Things were going well until the quad went over my head, and I got disoriented and flew it into a tree. Broke a prop, but am slowly learning how it responds in the air. Last week, I took it over to Parallax, and Nick flew it in the parking lot and gave me some pointers. Nick and Jim and Kevin have been nothing but supportive!
Burning through landing gear at a mean rate, so I decided to build up some little cushions…

FLC Online Educators Fall 2012 Dates (10:30 – 11:30 AM, Innovation Center)
Sept 7 & 21
Oct 12 & 26
Nov 16 Epic 24-Hour EdTech Jam
Dec 7
Taking Nick’s advice, I mostly just hopped around the field, but I had something of a yaw problem, and then ended up crashing in order to try and prevent a crash. Go figure. Broke 2 props and 2 landing gear bits, but I learned something. 39 more hours of practice, and I should be able to fly this thing!