Got a bunch of flight time in today, and I’m starting to just barely get the hang of it. Things were going well until the quad went over my head, and I got disoriented and flew it into a tree. Broke a prop, but am slowly learning how it responds in the air. Last week, I took it over to Parallax, and Nick flew it in the parking lot and gave me some pointers. Nick and Jim and Kevin have been nothing but supportive!
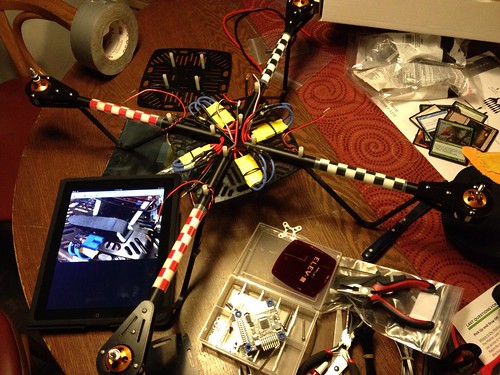
The first of two quadcopters is coming along. I’ve got the booms and frame assembled, and just need to work on the wiring harness before putting the top on. As is always the case with projects, there are things that I would have done differently, but they are mostly minor things, and I can use what I’ve learned as I start the second build.
To me, anyway.
After visiting with Nick yesterday, I crafted this diagram in an effort to make sense of the build and the steps to wiring up the booms:

I’ve never worked with EC3 connectors before, and the kit is lousy with them, so I watched this video to figure out how to work with them, and specifically to figure out how the little metal bits snap into the blue connectors. The trick seems to be to push them in when they’re still hot from soldering.
Daniel, Dave and I set out to start building the ELEV-8s yesterday, and we had some questions about wiring and layout, so Nick graciously agreed to meet with me this morning at Parallax. Nick (pictured below) and Kevin have both been really helpful, answering questions about the quadcopters, and providing general technical guidance.
 While I was there, I took a series of reference photos (below) of a fully built ELEV-8. Holding a finished one in my hands has helped me map out the next steps in the build – hopefully I’ll make some good progress tomorrow.
While I was there, I took a series of reference photos (below) of a fully built ELEV-8. Holding a finished one in my hands has helped me map out the next steps in the build – hopefully I’ll make some good progress tomorrow.






 Really. I picked up some of the last remaining project pieces from Parallax this morning. I was surprised (and pleased) to find safety glasses (2 pair!) in the box. Safety first.
Really. I picked up some of the last remaining project pieces from Parallax this morning. I was surprised (and pleased) to find safety glasses (2 pair!) in the box. Safety first.
I also picked up crash packs, which contain the bits that are likely to break in a hard landing, and some spare motors. We’re close to putting these things in the air – once they’re built, of course. The batteries haven’t come in yet, but I have a feeling they will be here soon. This is what the project looks like so far:

On the left are some Arduinos and GPS data loggers, then the receivers and telemetry bits, tools, cameras and field monitors in the middle, transmitters and crash packs on the right, and the two ELEV-8s in and out of boxes front and center. Soon!
 Spent the afternoon out at Parallax in Rocklin. Kevin and Nick and Ken flew various iterations of the ELEV-8 platform, and thrilled the gathered crowd with feats of derring-do. Balloons were popped, streamers were clipped, and one flying machine landed in the drink. A good time was had by all.
Spent the afternoon out at Parallax in Rocklin. Kevin and Nick and Ken flew various iterations of the ELEV-8 platform, and thrilled the gathered crowd with feats of derring-do. Balloons were popped, streamers were clipped, and one flying machine landed in the drink. A good time was had by all.
After the demo, the FLC contingent – Dan Ross (CIS and Engineering), Dave Myers (student and president of the recently chartered FLC Robotics Club) and I toured the facility, and I had the chance to talk to Nick about some of the particulars of FLC’s project, and to say hello to Jessica of Dweeb Den fame. Can’t wait to get the quadcopters in and get them flying! Below is a video of a two copters dogfighting, and here’s a link to the complete set of photos from today’s event. Thanks to Jim and and the whole Parallax crew.
 The trip to Parallax referenced in the previous post was a fruitful one indeed, as we (Folsom Lake College) ended up being the recipient of a sweet, brand new Propellor QuadRover.
The trip to Parallax referenced in the previous post was a fruitful one indeed, as we (Folsom Lake College) ended up being the recipient of a sweet, brand new Propellor QuadRover.
The bot is a burly little beast, a sturdy metal frame housing a 4-stroke Honda gasoline engine, a hydraulic propulsion system, disc brakes, and a powerful Propeller microcontroller.
Spent Saturday trying to find ~4 cups of ISO-46 hydraulic fluid, and finally ended up buying 2.5 gallons, which means I ended up with all the robot will need for the foreseeable future. In any event, the hydraulic system and the motor check out, and after charging the battery, I tried in vain to get the RC controller to communicate with the bot. I’m pretty sure the receiver is shot, so I’m looking into either securing a new one, or undertaking the delicate soldering that will make it work.
 What will we do with the QuadRover? That remains to be seen. I’ve lately been thinking of both the rover and the soon-to-arrive quadcopters as sensor platforms. That is, the plan is to equip them with an array of sensors and data loggers, and figure out amazing instructional activities that make use of the data. Ideally, I’ll get the whole system working, and then challenge students to come up with the use cases. Any bright ideas?
What will we do with the QuadRover? That remains to be seen. I’ve lately been thinking of both the rover and the soon-to-arrive quadcopters as sensor platforms. That is, the plan is to equip them with an array of sensors and data loggers, and figure out amazing instructional activities that make use of the data. Ideally, I’ll get the whole system working, and then challenge students to come up with the use cases. Any bright ideas?