
Can you guess what the problem was? I feel a bit foolish, but realized after much fussing and tweaking of settings that the kit contains two kinds of props: clockwise ones, and counterclockwise ones. I had three out of four correct, merely by accident, but once I replaced the errant one, I took the quad out into the night for just a basic spin up. Result: the roll problem is, of course, gone. Foolish though the mistake may have been, I’m reporting it here in the hope that someone might stumble upon it and learn from my errors. Tomorrow, we fly!

After buttoning up the wiring and top plate, took the quad outside to a flat spot and gave it a go. The props seem very uneven, with the right front one having more pepper than the others, and at full steam, the copter lurched to the left and I broke another prop. I think this is to be expected.
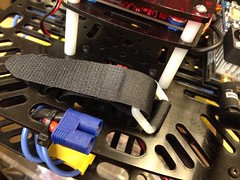
Finished with the LED wiring, which for whatever reason was a total pain, and then set to work on the wiring harness to connect the battery to the ESCs and other powered components. It took quite a long time, but I’m happy with the result. I added two JST connectors – I need to update the diagram to reflect two connectors instead of one – which will power the LEDs and the video transmitter (which hasn’t yet arrived) for first-person flight. Next up is a procedure to make sure the propellers spin in the appropriate directions – two clockwise, two counterclockwise. That procedure, however, requires the battery, which has yet to arrive.
Brought many of the parts for the project home – it’s much easier for me to work in my shop, where I have all of the tools and ventilation that I need to work efficiently.
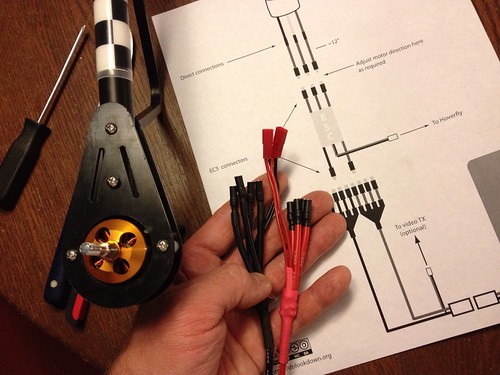
Spent a couple of hours soldering wires and EC3 connectors – these are little gold bullet type connectors – to the Electronic Speed Controls (ESCs) and motors. Lots of fiddly cutting, soldering, and twisting of wires, but I made good progress, finishing all 8 of the ESCs and enough motors for one of the ELEV-8s. I may just push through and try and get the rest of the motors wired up, as once this task is completed I can set to work assembling the airframe.
Still waiting on the batteries, video transmitter and POV camera – hopefully that stuff will show up next week some time.
Daniel, Dave and I set out to start building the ELEV-8s yesterday, and we had some questions about wiring and layout, so Nick graciously agreed to meet with me this morning at Parallax. Nick (pictured below) and Kevin have both been really helpful, answering questions about the quadcopters, and providing general technical guidance.
 While I was there, I took a series of reference photos (below) of a fully built ELEV-8. Holding a finished one in my hands has helped me map out the next steps in the build – hopefully I’ll make some good progress tomorrow.
While I was there, I took a series of reference photos (below) of a fully built ELEV-8. Holding a finished one in my hands has helped me map out the next steps in the build – hopefully I’ll make some good progress tomorrow.






 Really. I picked up some of the last remaining project pieces from Parallax this morning. I was surprised (and pleased) to find safety glasses (2 pair!) in the box. Safety first.
Really. I picked up some of the last remaining project pieces from Parallax this morning. I was surprised (and pleased) to find safety glasses (2 pair!) in the box. Safety first.
I also picked up crash packs, which contain the bits that are likely to break in a hard landing, and some spare motors. We’re close to putting these things in the air – once they’re built, of course. The batteries haven’t come in yet, but I have a feeling they will be here soon. This is what the project looks like so far:

On the left are some Arduinos and GPS data loggers, then the receivers and telemetry bits, tools, cameras and field monitors in the middle, transmitters and crash packs on the right, and the two ELEV-8s in and out of boxes front and center. Soon!
I had a good conversation with David from OpenROV this morning. We talked about potential partnerships, and I shared information about the Watershed Education Summit (WES), a project involving various El Dorado County high schools, the state Water Resources Control Board, the El Dorado County and Georgetown Divide Resource Conservation Districts, and the U.S. Forest Service. From the website:
During the four-day event, students, teachers, and resource professionals work together to complete the following tasks: stream cross-sections, stream gradient and stream water flow and velocity measurements, substrate pebble counting, macroinvertebrate sampling, shade measurement, Global Positioning Satellite data collection, water chemistry testing, riparian vegetation measurement, and large woody debris location. Partnerships with the El Dorado Resource Conservation District and the State Water Resources Control Board’s Clean Water Team are instrumental in making WES a success.
In quadcopter news, the POs are in, so I think I’ll be picking the ELEV-8s up from Parallax this week. The Go Pro HERO2s arrived last week, as well as some of the tools and odds and ends. Still waiting on the batteries, receivers, and some other pieces, but we should be ready to fly in the next couple of weeks.

Photo CC BY-NC-SA from http://openrov.com
This little beauty is the OpenROV. From the site:
OpenROV is a Do It Yourself telerobotics community centered around underwater exploration and education. We have developed a low-cost telerobotic submarine that can be built with mostly off-the-shelf parts. The goal of OpenROV is to democratize exploration by allowing anyone to explore and study underwater environments.
I spent a few minutes in conversation with the creators this afternoon after they spoke at Maker Faire. Since the start of the quadcopter project, I’ve been talking to Jason Pittman (Professor, Geosciences) about expanding our remote sensing capabilities, and bathymetry is part of that discussion. The OpenROV folks seemed very open to and interested in partnering with educational institutions, so I’m looking forward to checking out their platform and finding out how we might be able to work together.
 The quadcopter controllers arrived – specifically, a pair of Spektrum DX8s. They’re complex-looking things, with numerous switches and dials.
The quadcopter controllers arrived – specifically, a pair of Spektrum DX8s. They’re complex-looking things, with numerous switches and dials. They also have a sweet screen that will (as I understand it) display telemetry data. I put in a requisition for the telemetry bits today, and these should be the last of the reqs for phase 1.
They also have a sweet screen that will (as I understand it) display telemetry data. I put in a requisition for the telemetry bits today, and these should be the last of the reqs for phase 1.
This is Tess holding the DX8 box. If you’ve ever worked in an institutional or government context, you know that “getting things” takes a fair amount of work. There are forms to be filled out in triplicate, arcane budget strings to be chanted, quotes to secure – much crossing of t’s and dotting of i’s. Tess did the lion’s share of this work, and I am very grateful. Thanks Tess!
 The trip to Parallax referenced in the previous post was a fruitful one indeed, as we (Folsom Lake College) ended up being the recipient of a sweet, brand new Propellor QuadRover.
The trip to Parallax referenced in the previous post was a fruitful one indeed, as we (Folsom Lake College) ended up being the recipient of a sweet, brand new Propellor QuadRover.
The bot is a burly little beast, a sturdy metal frame housing a 4-stroke Honda gasoline engine, a hydraulic propulsion system, disc brakes, and a powerful Propeller microcontroller.
Spent Saturday trying to find ~4 cups of ISO-46 hydraulic fluid, and finally ended up buying 2.5 gallons, which means I ended up with all the robot will need for the foreseeable future. In any event, the hydraulic system and the motor check out, and after charging the battery, I tried in vain to get the RC controller to communicate with the bot. I’m pretty sure the receiver is shot, so I’m looking into either securing a new one, or undertaking the delicate soldering that will make it work.
 What will we do with the QuadRover? That remains to be seen. I’ve lately been thinking of both the rover and the soon-to-arrive quadcopters as sensor platforms. That is, the plan is to equip them with an array of sensors and data loggers, and figure out amazing instructional activities that make use of the data. Ideally, I’ll get the whole system working, and then challenge students to come up with the use cases. Any bright ideas?
What will we do with the QuadRover? That remains to be seen. I’ve lately been thinking of both the rover and the soon-to-arrive quadcopters as sensor platforms. That is, the plan is to equip them with an array of sensors and data loggers, and figure out amazing instructional activities that make use of the data. Ideally, I’ll get the whole system working, and then challenge students to come up with the use cases. Any bright ideas?