
After buttoning up the wiring and top plate, took the quad outside to a flat spot and gave it a go. The props seem very uneven, with the right front one having more pepper than the others, and at full steam, the copter lurched to the left and I broke another prop. I think this is to be expected.

Progress sometimes – often? – involves breaking things. I spent the better part of the day getting the quadcopter talking to the transmitter, and just when I thought I had things figured out, the beast angrily leapt from the table and crashed onto the floor, breaking a glass, severing one of the leads on my tester, and in the process shattering one of the props and embedding the broken end in a roll of duct tape.
This is progress! I’ve since removed the props until I can figure out exactly why the surge of aggression. I’ve got lots of props, so hopefully I can get through the early stages of the project with an intact quadcopter and all of my fingers.
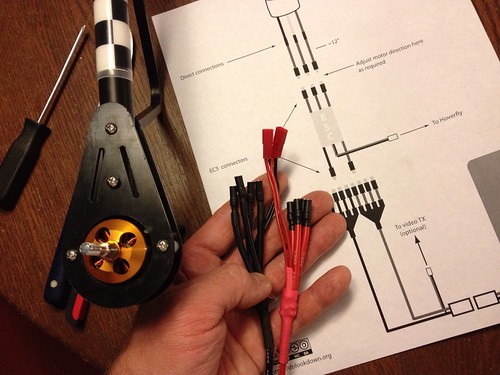
Finished with the LED wiring, which for whatever reason was a total pain, and then set to work on the wiring harness to connect the battery to the ESCs and other powered components. It took quite a long time, but I’m happy with the result. I added two JST connectors – I need to update the diagram to reflect two connectors instead of one – which will power the LEDs and the video transmitter (which hasn’t yet arrived) for first-person flight. Next up is a procedure to make sure the propellers spin in the appropriate directions – two clockwise, two counterclockwise. That procedure, however, requires the battery, which has yet to arrive.
The first of two quadcopters is coming along. I’ve got the booms and frame assembled, and just need to work on the wiring harness before putting the top on. As is always the case with projects, there are things that I would have done differently, but they are mostly minor things, and I can use what I’ve learned as I start the second build.
 These LED strips should make the copter more visible from the ground. I soldered the leads, then put some heat shrink on there to keep things neat.
These LED strips should make the copter more visible from the ground. I soldered the leads, then put some heat shrink on there to keep things neat.
I’m not entirely sure how I’ll connect these up, but since they’re 12 volt, I will probably just integrate a pair of wires on a JST connector into the soon-to-be-built power harness. Now that I think about it, I’ll need another pair for the video Tx. I suppose that means I’ll have to update the diagram.
That’s it for today…
Brought many of the parts for the project home – it’s much easier for me to work in my shop, where I have all of the tools and ventilation that I need to work efficiently.
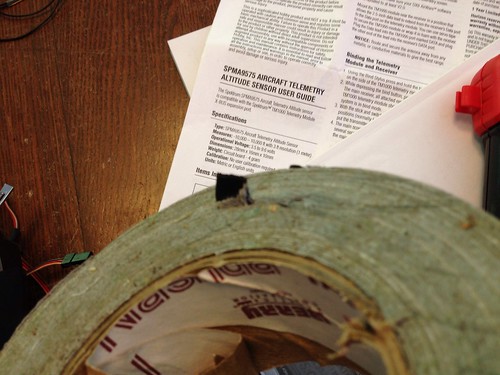
Spent a couple of hours soldering wires and EC3 connectors – these are little gold bullet type connectors – to the Electronic Speed Controls (ESCs) and motors. Lots of fiddly cutting, soldering, and twisting of wires, but I made good progress, finishing all 8 of the ESCs and enough motors for one of the ELEV-8s. I may just push through and try and get the rest of the motors wired up, as once this task is completed I can set to work assembling the airframe.
Still waiting on the batteries, video transmitter and POV camera – hopefully that stuff will show up next week some time.
To me, anyway.
After visiting with Nick yesterday, I crafted this diagram in an effort to make sense of the build and the steps to wiring up the booms:

I’ve never worked with EC3 connectors before, and the kit is lousy with them, so I watched this video to figure out how to work with them, and specifically to figure out how the little metal bits snap into the blue connectors. The trick seems to be to push them in when they’re still hot from soldering.
Daniel, Dave and I set out to start building the ELEV-8s yesterday, and we had some questions about wiring and layout, so Nick graciously agreed to meet with me this morning at Parallax. Nick (pictured below) and Kevin have both been really helpful, answering questions about the quadcopters, and providing general technical guidance.
 While I was there, I took a series of reference photos (below) of a fully built ELEV-8. Holding a finished one in my hands has helped me map out the next steps in the build – hopefully I’ll make some good progress tomorrow.
While I was there, I took a series of reference photos (below) of a fully built ELEV-8. Holding a finished one in my hands has helped me map out the next steps in the build – hopefully I’ll make some good progress tomorrow.






The New York Times Bits blog recently featured the OpenROV. From the article:
The machine is the latest prototype of the OpenROV–an open-source, remotely operated vehicle that could map the cave in 3D using software from Autodesk and collect water in places too tight for a diver to go.
It could change the future of ocean exploration.
 Really. I picked up some of the last remaining project pieces from Parallax this morning. I was surprised (and pleased) to find safety glasses (2 pair!) in the box. Safety first.
Really. I picked up some of the last remaining project pieces from Parallax this morning. I was surprised (and pleased) to find safety glasses (2 pair!) in the box. Safety first.
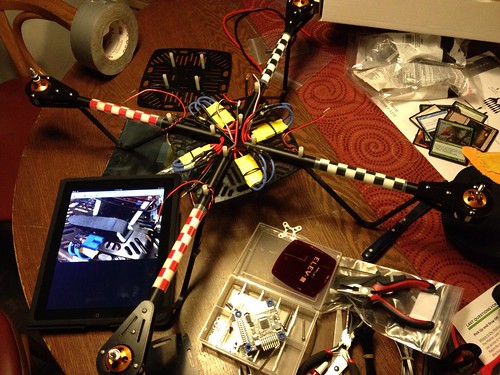
I also picked up crash packs, which contain the bits that are likely to break in a hard landing, and some spare motors. We’re close to putting these things in the air – once they’re built, of course. The batteries haven’t come in yet, but I have a feeling they will be here soon. This is what the project looks like so far:

On the left are some Arduinos and GPS data loggers, then the receivers and telemetry bits, tools, cameras and field monitors in the middle, transmitters and crash packs on the right, and the two ELEV-8s in and out of boxes front and center. Soon!